Orthogonal concepts are fundamental in fields like mathematics, computer science, and engineering, representing independence or non-overlapping properties. Understanding orthogonality helps you design systems or solve problems more efficiently by minimizing interference and maximizing modularity. Explore the rest of the article to discover practical applications and deeper insights into orthogonal principles.
Table of Comparison
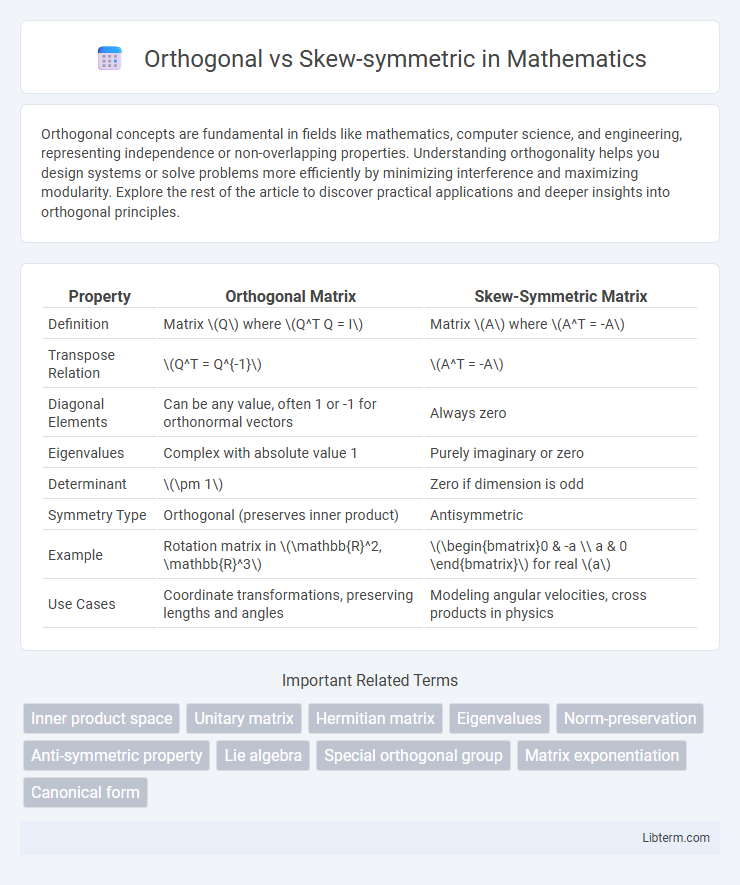
| Property | Orthogonal Matrix | Skew-Symmetric Matrix |
|---|---|---|
| Definition | Matrix \(Q\) where \(Q^T Q = I\) | Matrix \(A\) where \(A^T = -A\) |
| Transpose Relation | \(Q^T = Q^{-1}\) | \(A^T = -A\) |
| Diagonal Elements | Can be any value, often 1 or -1 for orthonormal vectors | Always zero |
| Eigenvalues | Complex with absolute value 1 | Purely imaginary or zero |
| Determinant | \(\pm 1\) | Zero if dimension is odd |
| Symmetry Type | Orthogonal (preserves inner product) | Antisymmetric |
| Example | Rotation matrix in \(\mathbb{R}^2, \mathbb{R}^3\) | \(\begin{bmatrix}0 & -a \\ a & 0 \end{bmatrix}\) for real \(a\) |
| Use Cases | Coordinate transformations, preserving lengths and angles | Modeling angular velocities, cross products in physics |
Introduction to Orthogonal and Skew-symmetric Matrices
Orthogonal matrices are square matrices whose transpose equals their inverse, preserving vector norms and angles, making them essential in rotations and reflections in Euclidean space. Skew-symmetric matrices, defined by the property that their transpose equals their negative, play a critical role in representing infinitesimal rotations and are characterized by zero diagonal entries and purely imaginary eigenvalues. Both matrix types have distinct algebraic structures and geometric interpretations, influencing areas such as linear transformations, stability analysis, and differential equations.
Mathematical Definitions and Properties
An orthogonal matrix \( Q \) satisfies \( Q^T Q = I \), implying its transpose equals its inverse and its columns form an orthonormal basis. A skew-symmetric matrix \( A \) satisfies \( A^T = -A \), meaning its diagonal entries are zero and off-diagonal entries are negatives of each other. Orthogonal matrices preserve length under transformation, while skew-symmetric matrices represent infinitesimal rotations in Lie algebra contexts.
Key Differences Between Orthogonal and Skew-symmetric Matrices
Orthogonal matrices are square matrices whose rows and columns form an orthonormal set, satisfying the condition \( Q^T Q = I \), where \( Q^T \) is the transpose and \( I \) is the identity matrix. Skew-symmetric matrices, also called antisymmetric matrices, satisfy the property \( A^T = -A \), meaning their transpose equals the negative of the original matrix. Key differences include orthogonal matrices preserving vector norms and angles, often representing rotations and reflections, while skew-symmetric matrices represent infinitesimal rotations and have purely imaginary eigenvalues or zero eigenvalues.
Geometric Interpretation
Orthogonal matrices represent linear transformations that preserve lengths and angles, corresponding to rotations or reflections in Euclidean space. Skew-symmetric matrices generate infinitesimal rotations, encoding angular velocity and defining oriented planes of rotation via their antisymmetric structure. The geometric interpretation distinguishes orthogonal matrices as rigid motions and skew-symmetric matrices as generators of continuous rotational flows.
Eigenvalues and Eigenvectors Analysis
Orthogonal matrices have eigenvalues on the complex unit circle, typically with absolute value one, and their eigenvectors form an orthonormal basis, ensuring stability and preserving vector norms. Skew-symmetric matrices, characterized by purely imaginary eigenvalues or zero, possess eigenvectors that are generally complex and orthogonal, reflecting their antisymmetric nature and applications in rotations and oscillations. The spectral decomposition of orthogonal matrices contrasts with the purely imaginary spectrum of skew-symmetric matrices, highlighting differences in symmetry properties and transformation behaviors.
Applications in Mathematics and Physics
Orthogonal matrices preserve vector norms and angles, playing a critical role in rotations and reflections in Euclidean spaces, which are fundamental in rigid body dynamics and computer graphics. Skew-symmetric matrices, characterized by their antisymmetry (A^T = -A), are essential in representing angular velocities and infinitesimal rotations in physics, especially within Lie algebras and the study of rotational motion. Both matrix types underpin numerous algorithms in numerical analysis and quantum mechanics, facilitating eigenvalue problems and symmetry operations.
Orthogonal Matrices: Real-world Examples
Orthogonal matrices commonly appear in computer graphics for 3D rotations, preserving vector lengths and angles during transformations. In robotics, these matrices enable precise motion control by maintaining orthogonality in joint rotation and orientation calculations. Orthogonal matrices also play a critical role in signal processing, where orthonormal basis functions are used for noise reduction and feature extraction.
Skew-symmetric Matrices: Real-world Examples
Skew-symmetric matrices are crucial in physics, particularly in representing angular velocity vectors in rigid body dynamics, where their structure encodes rotation axes and magnitudes. In computer graphics, skew-symmetric matrices facilitate efficient computation of cross products, improving algorithms for 3D transformations and animations. Robotics extensively uses skew-symmetric matrices in motion control and kinematics to model and manipulate rotational movements accurately.
Computational Aspects and Matrix Operations
Orthogonal matrices preserve vector norms under multiplication, enabling stable and efficient computations in numerical linear algebra, especially in QR decomposition and eigenvalue algorithms. Skew-symmetric matrices, defined by the property \(A^T = -A\), are instrumental in representing rotations and angular velocities, with matrix exponentials used to compute orthogonal matrices in Lie group theory. Both matrix types facilitate specialized operations: orthogonal matrices maintain numerical stability and condition numbers, while skew-symmetric matrices simplify antisymmetric bilinear forms and enable efficient computation of matrix exponentials for rotational transformations.
Summary and Comparative Insights
Orthogonal matrices preserve vector length and angle through rigid transformations, characterized by the property \(Q^T Q = I\), where \(Q\) is an orthogonal matrix and \(I\) is the identity matrix. Skew-symmetric matrices satisfy \(A^T = -A\) and inherently have zeros on the diagonal, often representing infinitesimal rotations in linear algebra and physics. While orthogonal matrices form group structures essential in rotation and reflection, skew-symmetric matrices generate Lie algebras associated with continuous symmetry transformations.
Orthogonal Infographic