Convex shapes curve outward, with all interior angles less than 180 degrees, making them straightforward to analyze in geometry and optimization problems. Understanding convex properties is essential for applications in mathematics, engineering, and computer science. Explore the rest of the article to uncover how convexity impacts your problem-solving strategies.
Table of Comparison
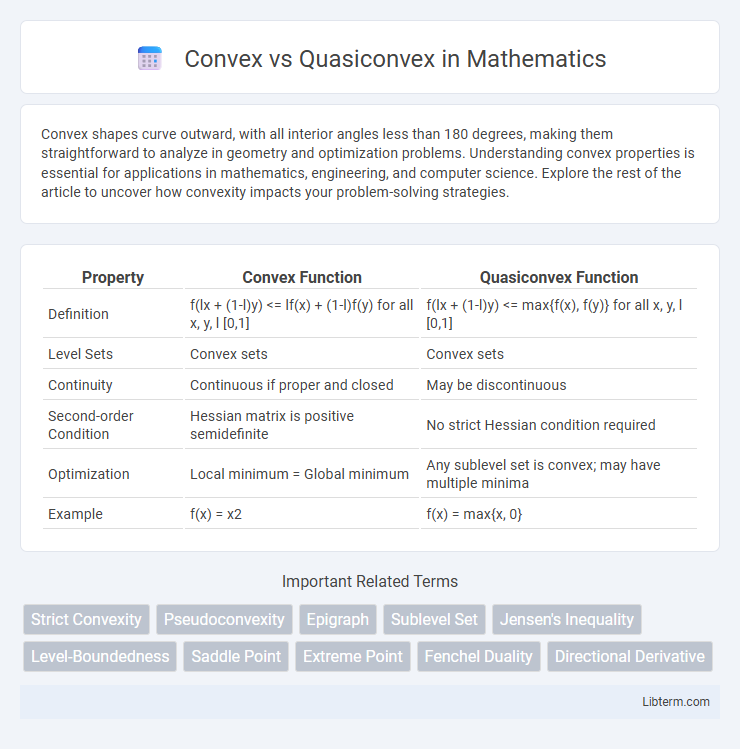
| Property | Convex Function | Quasiconvex Function |
|---|---|---|
| Definition | f(lx + (1-l)y) <= lf(x) + (1-l)f(y) for all x, y, l [0,1] | f(lx + (1-l)y) <= max{f(x), f(y)} for all x, y, l [0,1] |
| Level Sets | Convex sets | Convex sets |
| Continuity | Continuous if proper and closed | May be discontinuous |
| Second-order Condition | Hessian matrix is positive semidefinite | No strict Hessian condition required |
| Optimization | Local minimum = Global minimum | Any sublevel set is convex; may have multiple minima |
| Example | f(x) = x2 | f(x) = max{x, 0} |
Introduction to Convex and Quasiconvex Functions
Convex functions have the property that their epigraphs form convex sets, meaning any line segment between two points on the graph lies above or on the function, which ensures global minima are easily identifiable. Quasiconvex functions generalize convex functions by requiring only that their sublevel sets be convex, allowing for more flexibility in optimization problems while maintaining useful theoretical guarantees. Understanding the geometric and set-based properties of convex and quasiconvex functions is essential for selecting appropriate optimization strategies in fields like economics, engineering, and machine learning.
Definitions: Convexity vs Quasiconvexity
Convexity in mathematical optimization describes a set or function where any line segment connecting two points in the set or graph lies entirely within the set or above the graph, respectively, ensuring globally optimal solutions. Quasiconvexity generalizes this concept by requiring that all sublevel sets of the function are convex, meaning it allows non-convex functions whose minimization still retains some convex-like properties. The distinction lies in convex functions having convex epigraphs, while quasiconvex functions only guarantee convexity of sublevel sets, impacting solution strategies in optimization problems.
Key Mathematical Properties
Convex functions have the property that their epigraphs form convex sets, ensuring any line segment between two points on the graph lies above or on the function, which guarantees local minima are global minima. Quasiconvex functions relax this condition by allowing their sublevel sets to be convex, meaning the function might not be convex but still preserves certain optimization advantages like having convex sublevel sets. The key distinction lies in convex functions requiring the inequality f(tx + (1-t)y) <= tf(x) + (1-t)f(y), while quasiconvex functions satisfy f(tx + (1-t)y) <= max{f(x), f(y)} for all x, y and t in [0,1].
Visualizing Convex and Quasiconvex Sets
Convex sets are those where for any two points within the set, the entire straight line segment connecting them lies inside the set, visually appearing as a solid, unbroken shape without indentations. Quasiconvex sets, while not necessarily convex, maintain the property that all sublevel sets of a quasiconvex function are convex, often visualized as regions where level curves form nested, convex shapes without gaps. Understanding these distinctions aids in visualizing optimization problems, as convex sets simplify solution spaces while quasiconvex sets offer broader applicability with manageable complexity.
Differences in Optimization Implications
Convex optimization problems guarantee global minima due to their well-defined convex feasible regions and objective functions, ensuring any local minimum is also global. Quasiconvex problems, while allowing level sets to be convex, do not always ensure the function itself is convex, which may result in multiple local minima and complicate convergence guarantees. Optimization algorithms for convex problems typically exhibit faster convergence and more robust performance compared to quasiconvex counterparts, where specialized methods or heuristics may be required.
Common Examples in Mathematics
Convex functions include quadratic functions like f(x) = x2 and exponential functions such as f(x) = e^x, characterized by their property that any line segment between two points on the graph lies above or on the graph. Quasiconvex functions generalize convex functions and include examples like the maximum of linear functions f(x) = max{a1x + b1, a2x + b2}, which may not be convex but still have convex sublevel sets. Both concepts play crucial roles in optimization theory, with convexity ensuring global minima and quasiconvexity allowing more general conditions for solution sets.
Testing for Convexity and Quasiconvexity
Testing for convexity involves verifying that for any two points \( x, y \) in the domain and any \( \lambda \in [0,1] \), the function satisfies \( f(\lambda x + (1-\lambda) y) \leq \lambda f(x) + (1-\lambda) f(y) \). Quasiconvexity testing requires that all sublevel sets \( \{x \mid f(x) \leq \alpha\} \) are convex for every \( \alpha \in \mathbb{R} \), meaning \( f(\lambda x + (1-\lambda) y) \leq \max(f(x), f(y)) \). Gradient-based methods can also test convexity via positive semidefiniteness of the Hessian matrix, while quasiconvexity may be checked with monotonicity or quasiconvex level sets conditions.
Applications in Real-World Problems
Convex problems, characterized by convex objective functions and convex feasible regions, are widely applied in machine learning for optimizing loss functions, portfolio optimization in finance, and control systems due to their guaranteed global optima and efficient solution methods. Quasiconvex problems, where level sets are convex but functions may not be, find crucial use in energy management, economic modeling, and resource allocation where solution feasibility and tractability are essential despite non-convex structures. Both convex and quasiconvex optimization enable robust decision-making in real-world scenarios by balancing model complexity with computational efficiency.
Advantages and Limitations
Convex functions guarantee global optimality in optimization problems and enable efficient algorithms like gradient descent, providing strong convergence properties and simpler mathematical analysis. Quasiconvex functions generalize convexity and allow for modeling more complex phenomena where level sets remain convex, but they may lack the uniqueness of optimal solutions and can present challenges in designing efficient algorithms. While convexity ensures strong duality and well-understood solution structures, quasiconvexity expands applicability at the cost of potentially higher computational complexity and less robust optimality guarantees.
Conclusion and Further Reading
Convex functions ensure global optimality due to their well-defined curvature, while quasiconvex functions allow for broader solution sets but may lack uniqueness in minima. Understanding the distinctions between these classes aids in optimizing complex problems across economics, engineering, and machine learning. For further reading, consult Boyd and Vandenberghe's *Convex Optimization* and Zlobec's *Foundations of Convex Analysis*.
Convex Infographic