A projective hyperplane is a fundamental concept in projective geometry, representing a subspace of one dimension less than the ambient projective space. It plays a critical role in defining duality, intersections, and geometric transformations within projective spaces. Explore the rest of this article to discover how projective hyperplanes influence various applications in mathematics and computer vision.
Table of Comparison
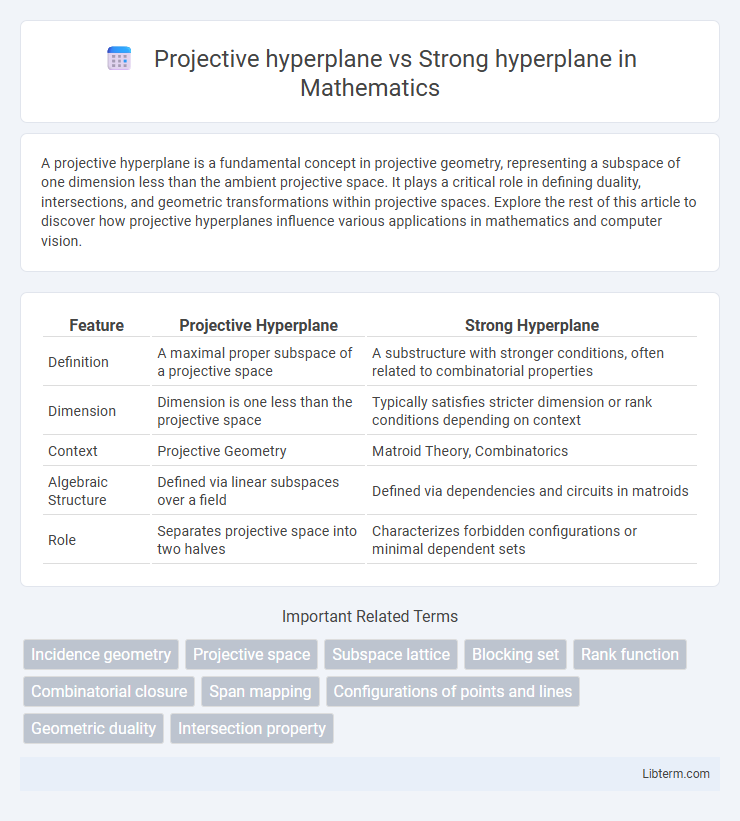
| Feature | Projective Hyperplane | Strong Hyperplane |
|---|---|---|
| Definition | A maximal proper subspace of a projective space | A substructure with stronger conditions, often related to combinatorial properties |
| Dimension | Dimension is one less than the projective space | Typically satisfies stricter dimension or rank conditions depending on context |
| Context | Projective Geometry | Matroid Theory, Combinatorics |
| Algebraic Structure | Defined via linear subspaces over a field | Defined via dependencies and circuits in matroids |
| Role | Separates projective space into two halves | Characterizes forbidden configurations or minimal dependent sets |
Introduction to Hyperplanes in Geometry
A projective hyperplane in geometry refers to a subspace of one dimension less than its ambient projective space, serving as a fundamental tool for defining projective transformations and dualities. Strong hyperplanes, in contrast, typically appear in specialized contexts such as oriented matroids or advanced convex geometry, where they satisfy stricter conditions related to separation properties and orientation. Understanding the distinction between projective hyperplanes and strong hyperplanes is crucial for exploring geometric structures, linear algebra, and their applications in areas like topology and combinatorics.
Defining Projective Hyperplanes
A projective hyperplane in projective geometry is defined as a maximal subspace of one dimension less than the ambient projective space, often characterized as a set of points satisfying a single homogeneous linear equation. It serves as a fundamental object dividing the projective space into two distinct regions, analogous to hyperplanes in Euclidean space but without a notion of distance or angle. Strong hyperplanes extend this concept by imposing additional algebraic or topological conditions, enhancing properties like rigidity or definability in specialized geometries.
Understanding Strong Hyperplanes
Strong hyperplanes are a specialized class of hyperplanes characterized by strict algebraic and geometric properties that ensure stability and robustness in projective spaces. Unlike general projective hyperplanes, which are defined purely by linear equations in projective geometry, strong hyperplanes correspond to configurations that preserve certain invariants under projective transformations, enhancing their applicability in areas like combinatorial optimization and coding theory. Understanding strong hyperplanes involves analyzing their role in partitioning vector spaces with maximal intersection properties and their connections to matroid theory and lattice structures.
Key Differences: Projective vs Strong Hyperplanes
Projective hyperplanes are defined as maximal proper linear subspaces in projective geometry, representing "lines at infinity" that extend Euclidean spaces into projective spaces. Strong hyperplanes, in contrast, are hyperplanes with additional algebraic properties ensuring stronger intersection or independence conditions in vector spaces or matroids. The key difference lies in their structural role: projective hyperplanes are geometric constructs emphasizing incidence in projective spaces, whereas strong hyperplanes emphasize algebraic rigidity and combinatorial properties.
Mathematical Properties of Each Hyperplane Type
Projective hyperplanes in projective geometry are defined as subspaces of codimension one, characterized by their invariance under projective transformations and intersections that correspond to linear forms vanishing on the hyperplane. Strong hyperplanes, typically studied in lattice theory or matroid theory, possess additional algebraic or combinatorial constraints, such as closure properties or strong minimality conditions, distinguishing them from general hyperplanes. The key mathematical properties contrast with projective hyperplanes by emphasizing structural rigidity and stronger intersection behaviors that impact their role in poset or geometric lattice representations.
Applications in Projective Geometry
Projective hyperplanes serve as fundamental constructs in projective geometry, enabling the representation of points at infinity and facilitating duality principles. Strong hyperplanes, a refined subset characterized by stricter incidence relations, enhance the study of configurations and intersection properties within projective spaces. These distinctions impact applications such as coordinate embeddings, perspective transformations, and the classification of geometric invariants.
Role in Incidence Structures
Projective hyperplanes serve as maximal proper subspaces in projective spaces, crucial for defining incidence relations between points and hyperplanes, ensuring that every line intersects the hyperplane in at least one point. Strong hyperplanes, characterized by their stronger intersection properties with subspaces of various dimensions, refine incidence structures by imposing more restrictive connectivity conditions and enabling finer classifications within combinatorial geometries. The role of projective versus strong hyperplanes in incidence structures centers on their differing influence on the arrangement and intersection patterns of subspaces, impacting the combinatorial and geometric properties of the underlying space.
Examples Illustrating Each Hyperplane
A projective hyperplane in projective geometry can be exemplified by the set of points satisfying a linear homogeneous equation like ax + by + cz = 0 in projective space P^2, representing a line. A strong hyperplane, often considered in algebraic or combinatorial contexts, might be illustrated by the subset of a vector space where a strong linear functional vanishes, such as the kernel of a surjective linear map. For instance, in R^3, the projective hyperplane corresponds to the projective line ax + by + cz = 0, while a strong hyperplane could be the plane defined as the zero set of a linear functional f(x,y,z) = ax + by + gz with non-degenerate properties.
Comparative Table: Projective vs Strong Hyperplanes
The comparative table between projective and strong hyperplanes highlights their key differences in geometric properties and algebraic structures. Projective hyperplanes correspond to linear subspaces in projective geometry and are characterized by homogeneous coordinates and linear equations, while strong hyperplanes have stricter intersection properties and often arise in specific algebraic or combinatorial contexts. Projective hyperplanes facilitate the study of incidence relations and dimension theory, whereas strong hyperplanes emphasize robustness under intersection and closure operations.
Concluding Insights and Further Reading
Projective hyperplanes in projective geometry emphasize incidence relations and duality, providing foundational insights into dimensional intersections within projective spaces. Strong hyperplanes, often studied in linear algebra and combinatorics, highlight structural rigidity and maximal subspace properties with strict inclusion criteria. Further exploration of these concepts can be found in advanced texts like "Introduction to Projective Geometry" by Coxeter and research articles on matroid theory for strong hyperplanes.
Projective hyperplane Infographic