Polyhedral shapes are three-dimensional solids characterized by flat polygonal faces, straight edges, and sharp vertices. Understanding their geometric properties is essential in fields such as mathematics, architecture, and computer graphics. Explore the rest of the article to discover how polyhedral forms influence various aspects of design and computation.
Table of Comparison
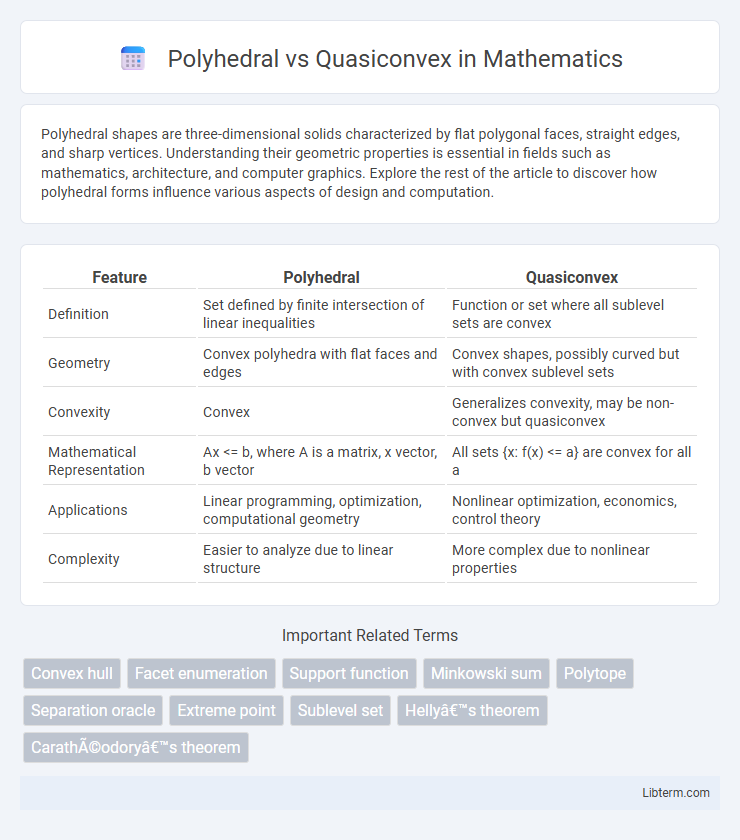
| Feature | Polyhedral | Quasiconvex |
|---|---|---|
| Definition | Set defined by finite intersection of linear inequalities | Function or set where all sublevel sets are convex |
| Geometry | Convex polyhedra with flat faces and edges | Convex shapes, possibly curved but with convex sublevel sets |
| Convexity | Convex | Generalizes convexity, may be non-convex but quasiconvex |
| Mathematical Representation | Ax <= b, where A is a matrix, x vector, b vector | All sets {x: f(x) <= a} are convex for all a |
| Applications | Linear programming, optimization, computational geometry | Nonlinear optimization, economics, control theory |
| Complexity | Easier to analyze due to linear structure | More complex due to nonlinear properties |
Introduction to Polyhedral and Quasiconvex Sets
Polyhedral sets are defined by a finite number of linear inequalities and are characterized by their sharp edges and flat faces, making them fundamental in linear optimization problems. Quasiconvex sets, on the other hand, have the property that all their sublevel sets are convex, allowing for more general shapes that include non-linear boundaries while still ensuring certain optimization guarantees. Understanding the distinction between these sets is crucial for fields like mathematical optimization and convex analysis, as it influences the choice of algorithms and solution techniques.
Defining Polyhedral Sets
Polyhedral sets are defined as intersections of a finite number of half-spaces, characterized by linear inequalities of the form Ax <= b, where A is a matrix and b is a vector. These sets are convex by nature and form the foundational building blocks of linear programming and combinatorial optimization. Unlike general quasiconvex sets, polyhedral sets have a piecewise-linear boundary allowing for efficient computational methods such as vertex enumeration and linear separation.
Understanding Quasiconvex Sets
Quasiconvex sets generalize polyhedral sets by allowing level sets of quasiconvex functions, characterized by all lower contour sets being convex, which need not be polyhedra. Understanding quasiconvex sets involves recognizing that their shape can be curved or non-polyhedral, yet they preserve essential convexity properties useful in optimization and economics. Unlike polyhedral sets defined by a finite number of linear inequalities, quasiconvex sets can be described by nonlinear, convex constraints that maintain feasibility regions with no internal holes.
Key Differences Between Polyhedral and Quasiconvex Sets
Polyhedral sets are defined as the intersection of a finite number of half-spaces, resulting in a convex set with flat, linear boundaries, whereas quasiconvex sets are characterized by level sets of quasiconvex functions which may have non-linear or curved boundaries but maintain a single connected region where the function values do not exceed a certain threshold. The key difference lies in the geometric structure: polyhedral sets exhibit piecewise linear boundaries formed by linear inequalities, while quasiconvex sets can include more complex, smooth contours due to their definition via quasiconvex functions. Furthermore, optimization over polyhedral sets typically reduces to linear programming, while optimization over quasiconvex sets requires more general quasiconvex programming techniques, reflecting differences in computational complexity and solution methods.
Geometric Properties and Intuition
Polyhedral sets are defined by a finite number of linear inequalities and have flat faces, edges, and vertices, making their geometric structure highly intuitive and easy to visualize as polygons or polyhedra. Quasiconvex functions, on the other hand, are characterized by convex sublevel sets, which means all points with function values below a certain threshold form a convex region, capturing a broader class of shapes beyond polyhedra. This geometric difference highlights that while polyhedral sets are always convex with linear boundaries, quasiconvexity extends convexity to functions whose contours may be curved but still maintain a convex structure in their sublevel sets.
Applications in Optimization
Polyhedral optimization problems feature constraints represented by linear inequalities, making them ideal for linear programming and combinatorial optimization with efficient simplex and cutting-plane methods. Quasiconvex optimization extends these applications by handling non-linear but quasiconvex functions, enabling solutions in fields like portfolio optimization and robust control where objective functions exhibit level sets that remain convex. Leveraging the structural properties of polyhedral sets or quasiconvex functions enhances algorithmic performance and solution accuracy in large-scale and real-world optimization tasks.
Computational Complexity Comparison
Polyhedral optimization problems are generally characterized by linear inequalities defining feasible regions, leading to polynomial-time solvability through linear programming algorithms such as the simplex method or interior-point methods. Quasiconvex optimization, involving quasiconvex functions with potentially non-polyhedral feasible sets, often incurs higher computational complexity due to the necessity of nonlinear techniques or iterative approximation methods like bisection or cutting plane algorithms. The computational complexity difference arises because polyhedral problems leverage convex polytope structures enabling efficient vertex enumeration, whereas quasiconvex problems must handle more general convex level sets lacking simple finite representation.
Advantages and Limitations
Polyhedral optimization excels in solving linear programming problems due to its well-defined, vertex-based feasible region, enabling efficient simplex and interior-point methods with guaranteed convergence properties. Quasiconvex optimization offers broader applicability for non-linear problems where objective functions or constraints are not strictly convex, allowing for more flexible modeling of real-world scenarios but often requiring more complex algorithms and lacking the strong convergence guarantees seen in polyhedral cases. Limitations of polyhedral optimization include restricted applicability to linear or piecewise linear problems, while quasiconvex methods can suffer from increased computational complexity and difficulties in ensuring global optima.
Real-World Examples
Polyhedral optimization techniques are widely used in linear programming for supply chain management, where constraints form polyhedra representing feasible regions. Quasiconvex optimization finds applications in portfolio optimization, where risk measures create non-linear but quasiconvex objective functions. Both approaches facilitate decision-making in economics and engineering by leveraging specific structural properties of optimization problems.
Conclusion: Choosing the Right Approach
Polyhedral methods excel in problems with linear constraints and piecewise linear objectives, offering computational efficiency and clear geometric interpretations. Quasiconvex optimization is better suited for non-linear, convex-like functions where the level sets are convex, enabling more flexible modeling of complex relationships. Selecting the right approach depends on problem structure, with polyhedral techniques favored in linear optimization contexts and quasiconvex approaches ideal for smoother, convex-level set problems.
Polyhedral Infographic