Convex shapes curve outward, with all points on the boundary equidistant or farther from the shape's center compared to any interior point. Understanding convex geometry is crucial in fields like computer graphics, optimization, and economics, where shape properties influence problem-solving strategies. Explore the rest of the article to learn how convexity can impact your applications and everyday calculations.
Table of Comparison
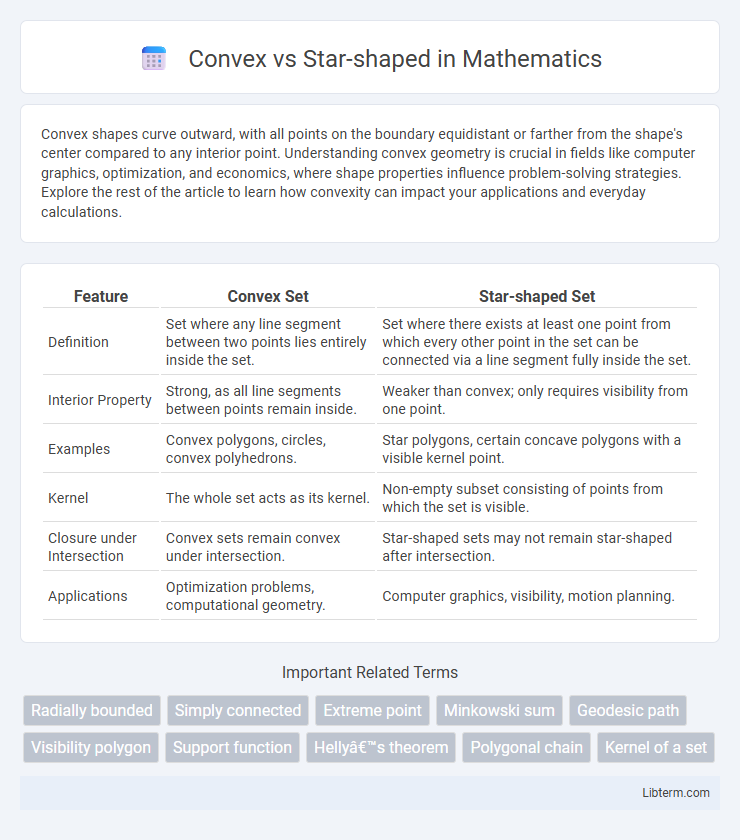
| Feature | Convex Set | Star-shaped Set |
|---|---|---|
| Definition | Set where any line segment between two points lies entirely inside the set. | Set where there exists at least one point from which every other point in the set can be connected via a line segment fully inside the set. |
| Interior Property | Strong, as all line segments between points remain inside. | Weaker than convex; only requires visibility from one point. |
| Examples | Convex polygons, circles, convex polyhedrons. | Star polygons, certain concave polygons with a visible kernel point. |
| Kernel | The whole set acts as its kernel. | Non-empty subset consisting of points from which the set is visible. |
| Closure under Intersection | Convex sets remain convex under intersection. | Star-shaped sets may not remain star-shaped after intersection. |
| Applications | Optimization problems, computational geometry. | Computer graphics, visibility, motion planning. |
Introduction to Convex and Star-shaped Sets
Convex sets are defined by the property that for any two points within the set, the entire line segment connecting them lies entirely inside the set, ensuring no indentations or holes. Star-shaped sets contain at least one point from which every other point in the set can be connected via a line segment fully contained within the set, allowing for certain inward curves absent in convex sets. Understanding these definitions is fundamental for applications in optimization, computational geometry, and shape analysis.
Definitions and Key Concepts
Convex sets are defined by the property that for any two points within the set, the entire line segment connecting them lies entirely inside the set, ensuring no indentations or holes. Star-shaped sets generalize this notion by requiring only the existence of at least one point from which every point in the set is visible, meaning all line segments drawn from this point to any other point in the set remain inside the boundary. Understanding these definitions highlights that while all convex sets are star-shaped with any point as a center, not all star-shaped sets are convex, emphasizing the difference in internal structure and geometric constraints.
Visualizing Convex and Star-shaped Regions
Convex regions contain all line segments connecting any two points within the shape, resulting in no indentations or inward curves, which simplifies visualization through straightforward boundary edges. Star-shaped regions allow for a central point from which all other points in the region can be seen, creating a visualization characterized by radial symmetry and potential inward angles. Visualizing convex sets often involves polygonal or smooth curved boundaries without recesses, while star-shaped regions show a distinctive center with rays extending outward, highlighting their unique geometric property.
Geometric Properties Comparison
Convex shapes have the property that any line segment connecting two points within the shape lies entirely inside it, ensuring no indentations on the boundary, which contrasts with star-shaped shapes that only require one interior point where all other points in the shape can be connected by line segments lying inside the shape. The geometric property of convexity guarantees global visibility between any two points within the shape, while star-shaped regions allow local visibility radiating from a specific kernel point but may contain concavities. Convex shapes exhibit simpler mathematical properties and easier computational handling in optimization and geometric algorithms, whereas star-shaped shapes offer more flexibility in modeling shapes with central visibility but lack the strict uniformity of convex forms.
Mathematical Criteria for Convexity
Convex sets in mathematics are defined by the property that, for any two points within the set, the entire line segment connecting them lies inside the set, reflecting a strict geometric convexity criterion. Star-shaped sets relax this condition by requiring just one point, called the star center, from which every other point in the set can be connected by a line segment that remains inside the set. This distinction highlights the mathematical criterion of convexity as a global condition involving all pairs of points, compared to star-shapedness, which is based on visibility from a single internal point.
Mathematical Criteria for Star-shapedness
Star-shaped sets in mathematics are defined by the existence of at least one point, called a star center, from which every other point in the set is visible via a line segment entirely contained within the set. Convex sets require that this visibility condition holds for every pair of points in the set, meaning every line segment connecting any two points lies fully inside the set. The mathematical criterion for star-shapedness is the presence of a point \( x_0 \) such that for any point \( x \) in the set, the line segment \( [x_0, x] \subseteq S \) holds, distinguishing it from the stricter convexity condition where this must hold for all point pairs.
Examples in Mathematics and Real Life
Convex sets in mathematics include examples like convex polygons, where all interior angles are less than 180 degrees, and convex functions that exhibit a single global minimum. Star-shaped sets contain points from which every other point in the set is visible, such as star polygons or the human lung shape in biology, demonstrating practical relevance beyond theoretical math. Real-life examples of convex shapes include simple geometric objects like rectangles and circles, while star-shaped configurations often appear in urban planning layouts and natural formations.
Applications in Computational Geometry
Convex shapes are fundamental in computational geometry due to their property that any line segment between two points inside the shape remains entirely within it, enabling efficient algorithms for collision detection, convex hull construction, and optimization problems. Star-shaped shapes, containing at least one point from which the entire shape is visible, offer flexibility for visibility-based applications such as robotics path planning and computer vision where non-convex regions must be considered. Both shape classes are critical in mesh generation, spatial partitioning, and geometric searching, with convex sets often simplifying computations while star-shaped models provide more realistic representations in complex environments.
Pros and Cons of Convex vs Star-shaped Sets
Convex sets guarantee that any line segment connecting two points within the set lies entirely inside the set, enabling simpler optimization and analysis due to their well-defined shape and absence of indentations. Star-shaped sets, while more general and flexible, allow some non-convex features with a central point visible to all other points, facilitating modeling of more complex geometries but complicating mathematical treatment and optimization. Convex sets provide stronger guarantees for global optimality, whereas star-shaped sets offer greater geometric versatility at the cost of potentially harder computational problems.
Summary and Key Differences
Convex shapes are defined by the property that any line segment connecting two points within the shape lies entirely inside the shape, ensuring no inward indentations. Star-shaped shapes have at least one point, called the kernel, from which every other point in the shape is visible along a line segment lying entirely within the shape, allowing for some concavities. The key difference is that convex shapes are always star-shaped with the entire shape as the kernel, while star-shaped shapes may have concavities and a more limited kernel.
Convex Infographic