An affine subspace is a geometric structure that generalizes the concept of a linear subspace by allowing translations from the origin. It can be described as a set obtained by shifting a linear subspace by a fixed vector, maintaining properties like parallelism but not necessarily containing the origin. Explore the following article to deepen your understanding of affine subspaces and their applications.
Table of Comparison
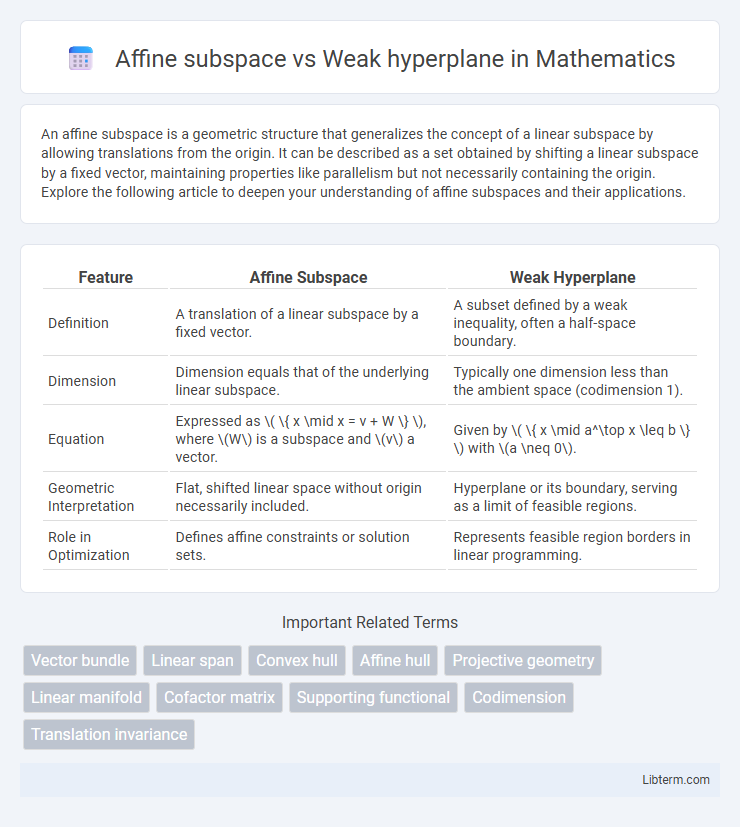
| Feature | Affine Subspace | Weak Hyperplane |
|---|---|---|
| Definition | A translation of a linear subspace by a fixed vector. | A subset defined by a weak inequality, often a half-space boundary. |
| Dimension | Dimension equals that of the underlying linear subspace. | Typically one dimension less than the ambient space (codimension 1). |
| Equation | Expressed as \( \{ x \mid x = v + W \} \), where \(W\) is a subspace and \(v\) a vector. | Given by \( \{ x \mid a^\top x \leq b \} \) with \(a \neq 0\). |
| Geometric Interpretation | Flat, shifted linear space without origin necessarily included. | Hyperplane or its boundary, serving as a limit of feasible regions. |
| Role in Optimization | Defines affine constraints or solution sets. | Represents feasible region borders in linear programming. |
Introduction to Affine Subspaces and Weak Hyperplanes
Affine subspaces are geometric structures that generalize linear subspaces by allowing translations, characterized by a set of points obtained by adding a fixed vector to every vector in a linear subspace. Weak hyperplanes, in contrast, are subsets of vector spaces defined by inequalities rather than equalities, representing half-spaces or boundary regions but without the strict linear equality constraint of hyperplanes. Understanding affine subspaces involves examining their dimension and translation properties, while weak hyperplanes require analyzing their role in partitioning spaces and their relationships to convex sets.
Mathematical Definitions
An affine subspace is a translation of a linear subspace by a fixed vector, represented as \( \{ \mathbf{v} + \mathbf{w} : \mathbf{w} \in W \} \) where \( W \) is a linear subspace and \( \mathbf{v} \) is a vector in the ambient space. A weak hyperplane can be defined as a set satisfying a linear inequality \( \mathbf{a}^\top \mathbf{x} \leq b \), where equality defines the hyperplane, and the inequality describes the half-space including the hyperplane boundary. Affine subspaces preserve parallelism and have dimension \( k \) if the underlying subspace \( W \) has dimension \( k \), while weak hyperplanes include both the hyperplane and one of its adjacent half-spaces, crucial in optimization and convex analysis.
Geometric Interpretations
An affine subspace in geometry is a translation of a linear subspace, representing a flat subset of space that extends infinitely in certain directions but does not necessarily pass through the origin. A weak hyperplane generalizes the concept of a hyperplane by allowing it to be defined with fewer strict linear constraints or in a relaxed sense, often used in optimization or computational geometry. Geometrically, an affine subspace maintains parallelism and dimension properties similar to linear subspaces, while a weak hyperplane can be viewed as a boundary-like structure that may not fully partition space into distinct half-spaces as a traditional hyperplane does.
Dimensional Differences
An affine subspace in n-dimensional space retains the same dimension as the underlying vector subspace, defined by a translation of a linear subspace, thus having dimension k where 0 <= k <= n. A weak hyperplane, often described in convex geometry, typically has dimension n-1 but allows for certain degeneracies or relaxations compared to a strict hyperplane, which is a flat affine subspace of dimension n-1. The key dimensional difference lies in the rigid dimensional fixity of weak hyperplanes at n-1, while affine subspaces can vary dimensionally from 0 up to n.
Properties and Structure
An affine subspace is a translation of a linear subspace that does not necessarily pass through the origin, characterized by closure under affine combinations and preserving parallelism, while a weak hyperplane is a generalization of a hyperplane that may lack strict linearity or integrability conditions. The structure of an affine subspace is defined by its dimension and direction subspace, whereas a weak hyperplane often exhibits relaxed constraints, enabling inclusion of non-linear or less rigid boundary surfaces. Properties such as dimensionality, closure under specific sets of operations, and geometric interpretation distinguish affine subspaces from weak hyperplanes in both algebraic and topological contexts.
Applications in Linear Algebra
Affine subspaces serve as fundamental structures in linear algebra, enabling the representation of solutions to systems of linear equations and facilitating dimensionality reduction techniques. Weak hyperplanes, characterized by their relaxed linear constraints, find applications in approximate classification problems and robust optimization where strict hyperplane boundaries are infeasible. Employing affine subspaces and weak hyperplanes enhances computational methods in machine learning, signal processing, and data analysis through improved flexibility in modeling linear relationships.
Comparison: Affine Subspace vs Weak Hyperplane
An affine subspace is a translation of a linear subspace, characterized by a set of points formed by adding a fixed vector to all vectors in a linear subspace, maintaining dimensionality less than the ambient space. A weak hyperplane, often defined in optimization and machine learning, is a geometric construct that generalizes hyperplanes by allowing certain constraints to be non-strict or relaxed, which can lead to broader solution sets compared to strict affine hyperplanes. The key comparison lies in rigidity; affine subspaces maintain strict linearity and fixed dimensions, while weak hyperplanes introduce flexibility in constraint satisfaction, often used to handle uncertainties or soft-margin classifications.
Examples in Real-World Problems
An affine subspace represents a translated vector space used in machine learning for modeling linear regression problems where data points lie along shifted planes, such as predicting housing prices based on multiple features. Weak hyperplanes appear in support vector machines in scenarios with overlapping classes, providing soft decision boundaries that allow some misclassifications to optimize margin maximization in noisy real-world datasets like spam detection. These concepts enable effective dimensionality reduction and classification by capturing underlying structures or tolerating data noise in practical applications.
Key Theorems and Proofs
Affine subspaces are subsets of vector spaces closed under affine combinations, characterized by translation of linear subspaces; key theorems like the Affine Dimension Theorem establish their dimension properties and intersections. Weak hyperplanes, defined as maximal proper affine subspaces, relate closely to hyperplanes but differ in rigidity and boundary conditions, with proofs often leveraging separation theorems in convex analysis. Core proofs distinguish affine subspaces using linear independence and vector translations, while weak hyperplane arguments emphasize maximality and containment criteria within affine geometries.
Summary and Implications
Affine subspaces generalize linear subspaces by allowing translations, resulting in flat subsets defined by a point and a direction, crucial in geometry and linear algebra applications. Weak hyperplanes, as relaxed versions of hyperplanes, allow for broader boundary definitions in convex analysis and optimization, providing flexibility in classification and separation problems. Understanding the distinctions and use cases of affine subspaces versus weak hyperplanes aids in selecting appropriate mathematical models for data representation and decision boundaries in machine learning and computational geometry.
Affine subspace Infographic